
اطلاعیه دفاع دکترا
جلسه دفاعیه رساله دکتری آقای علی آنالوئی در دانشکده مهندسی مکانیک دانشگاه سمنان برگزار گردید.
جلسه دفاعیه دکتری آقای علی آنالوئی دانشجوی دکتری رشته مهندسی مکانیک گرایش دینامیک، کنترل و ارتعاشات تحت عنوان "طراحی مسیر کمینه طول همراه با احتناب از برخورد با موانع برای ربات های سیار" در روز چهارشنبه مورخ 18/07/1403 ساعت 16:00 در دانشکده مهندسی مکانیک دانشگاه سمنان برگزار گردید.
این رساله تحت راهنمایی آقای دکتر امین نیکوبین انجام شده است و توسط داوران محترم آقای دکتر سید علی اکبر موسویان (داور خارجی) و آقایان دکتر عباس دیدبان و دکتر محمدرضا دوست محمدیان (داوران داخلی) مورد ارزیابی قرار گرفته است.
چکیده :
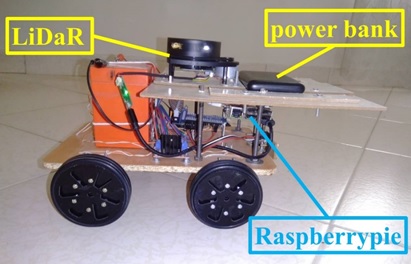
یکی از موضوعات چالش برانگیز در ساخت ربات های هوشمند، مسئله ناوبری[1] است. چالش های پیشروی یک ربات برای انجام موفق ناوبری شامل درک مناسبی از محیط اطراف، تعیین موقعیت خود در محیط، تشخیص صحیحی از موانع و طراحی مسیری جهت رسیدن به نقطه مقصد با در نظر گرفتن قیدهای تحمیل شده توسط محیط است. تمرکز این رساله بر روی مرحله تشخیص موانع و طراحی مسیر است. به این منظور، ابتدا به ارائه یک الگوریتم تشخیص و ردیابی موانع پرداخته شده است. ویژگی مهم این الگوریتم سرعت بالا و توانایی آن در محاسبه سرعت های انتقالی و دورانی موانع با دقت و انسجام بالا است. عملکرد این الگوریتم با انجام آزمایش های مختلف به طور عملی بر روی یک ربات خودران صحه گذاری شده است. همچنین، این الگوریتم بر روی پایگاه داده کیتی[2] آزمایش شده و سرعت آن با سریع ترین الگوریتم ها مقایسه شده است. نتیجه این مقایسه الگوریتم ارائه شده را جزء سریع ترین الگوریتم ها نشان می دهد. در ادامه به توسعه الگوریتم طراحی مسیر فاصله زمانی برای خودروهای خودران پرداخته شده است. به این منظور، با ایجاد تغییراتی در ساختار الگوریتم فاصله زمانی، این الگوریتم به یک الگوریتم دولایه تبدیل شده است که در لایه بالایی، با تعریف یک تابع جاده جدید، لاین هدف مشخص شده و در لایه پایینی مسیری برای رسیدن به لاین هدف و ادامه حرکت در امتداد آن طراحی می شود. عملکرد این الگوریتم، پس از طراحی یک کنترل کننده پیمایش مسیر، بر روی شبیه ساز کارسیم[3] صحه گذاری شده است. توسعه دیگری که در این رساله بر روی الگوریتم فاصله زمانی انجام شده است، شامل اصلاح روابط و فرمولاسیون الگوریتم جهت در نظر گرفتن حرکت دورانی اجسام است. پس از اصلاح الگوریتم، عملکرد آن در شبیه سازی و انجام آزمایش بر روی ربات خودران صحه گذاری شده است. در پایان، به کمینه سازی انرژی در طراحی مسیر در الگوریتم فاصله زمانی پرداخته شده است. نتیجه مهم به دست آمده در این بخش این است که در الگوریتم طراحی مسیری که طراحی پروفایل سرعت در آن صورت نمی گیرد، مسیر کمینه طول همان مسیر کمینه انرژی است.
واژههای کلیدی: طراحی مسیر، اجتناب از برخورد، ربات های سیار، خودروهای خودران، تشخیص و ردیابی موانع
:Abstract
One of the challenging topics in intelligent robots is navigation. The challenges facing a robot to successfully navigate include perception, localization, obstacle detection, and planning a path to reach the destination while considering constraints imposed by the environment. This thesis focuses on the obstacle detection and path planning stages. To this end, first, an obstacle detection and tracking algorithm is presented. The key feature of this algorithm is its quickness and ability to accurately and cohesively calculate the translational and rotational velocities of obstacles. The algorithm's performance is validated through practical experiments on an autonomous robot. Additionally, it is tested on the KITTI dataset, and its speed is compared with the fastest algorithms. This comparison shows that the proposed algorithm is among the fastest algorithms. Furthermore, the thesis focuses on developing the Time Distance path planning algorithm for autonomous vehicles. To this end, by modifying the structure of the Time Distance algorithm, it is transformed into a two-layered algorithm. In the upper layer, a new Route Function is defined to determine the target lane. In the lower layer, a path is planned to reach the target lane and drive the vehicle along it. The performance of this algorithm is validated on the CarSim simulator after designing a path-tracking controller. Another development made in this thesis regarding the Time Distance algorithm involves modifying the structure and formulation of the algorithm to incorporate rotational motion of objects. After the algorithm is modified, its performance is validated through simulation and experiments on an autonomous robot. Finally, the thesis addresses energy minimization in path planning for the Time Distance algorithm. A significant finding in this section is that in a path planning algorithm which does not include velocity planning, the minimum-length path is the same as the minimum-energy path.
Keywords: Path Planning, Collision Avoidance, Mobile Robots, Autonomous Vehicles, Obstacle Detection and Tracking
این رساله با درجه عالی مورد پذیرش هیات داوران قرار گرفت و تاکنون یک مقاله ISI با کوارتایل Q1 از نتایج این تحقیق استخراج و منتشر شده است.




نظر دهید